Bulk Cargo Vessels
|
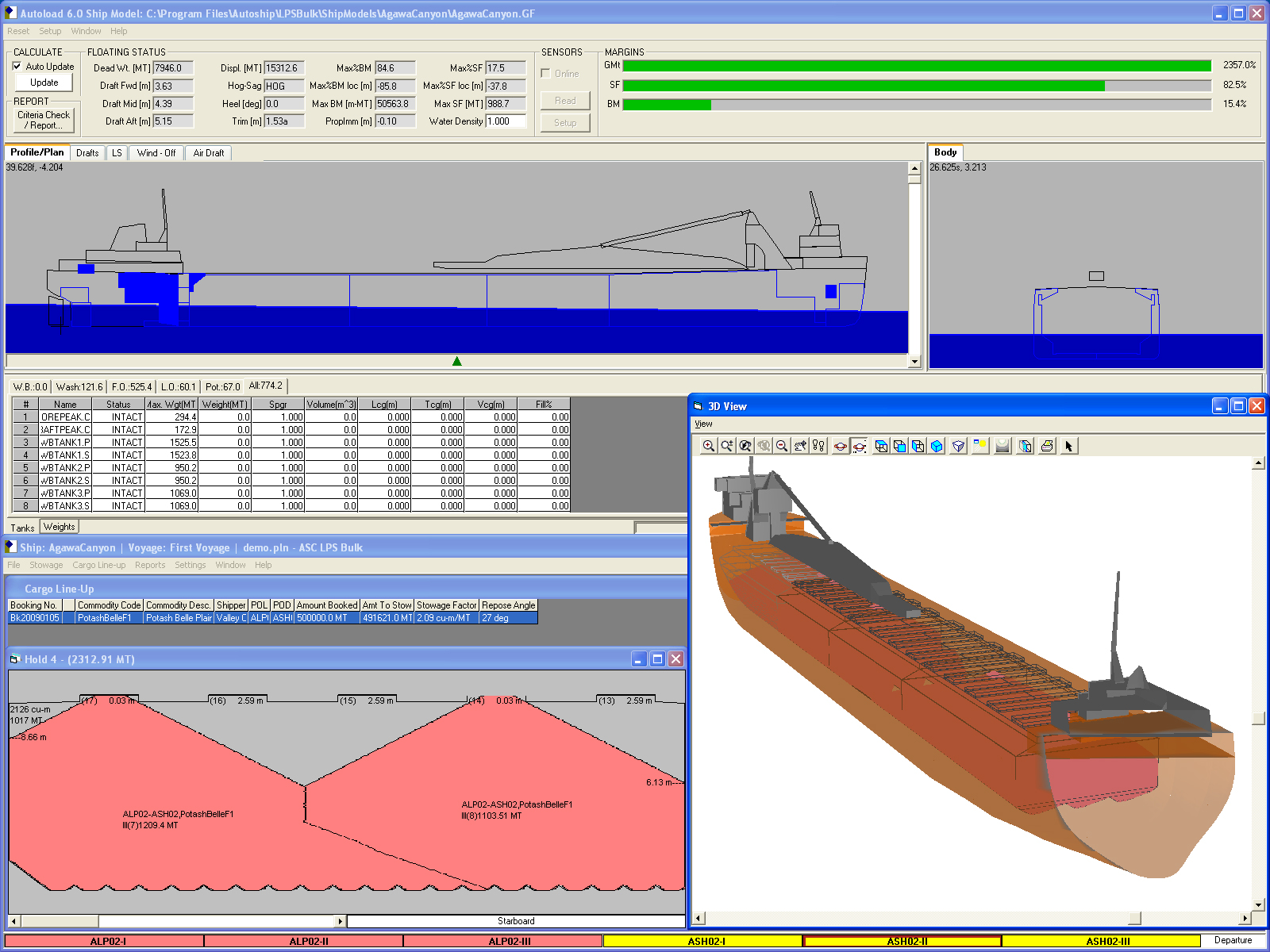
Our Bulk stowage planning module accurately models holds, hopper size and placement, and cargo piles. The graphical cargo management and stowage planning tools support both self-unloading and gearless bulk carrier ships. The software accounts for loading and unloading equipment, loading method, pile size and location, heel, trim, and cargo hold dimensions. Cargo stowage and unloading are planned in the same interface by dragging and dropping between the cargo list window and the hold window. Using a highly accurate model of the hold, the program simulates and displays the size, shape, and characteristics of the piles when loading cargo. These calculations are made according to the method of filling, the cargo’s angle of repose, the trim and heel of the vessel, and the size and position of the loader heads (whether stationary or moving). More than one loader at a time may be simulated. Likewise, pile shape and characteristics while unloading are calculated and displayed – using computer models of the gates (self-unloading) or the hatches (gearless) being used. The results of loading, repositioning, or removal of cargo at any selected port are automatically predicted for all future ports in the voyage. Space conflict control is performed in each port, to prevent inadvertent overlapping of different cargoes during the same time period. Throughout the loading and unloading processes, the ship’s hydrostatic and stress parameters are constantly calculated by the hydrostatics engine. Data regarding the voyage is easily transferred between planners, vessels, and offices throughout the customer’s locations. All Autoship stowage planning systems include the latest version of our comprehensive hydrostatics analysis engine – Autoload® |